行业动态
产品环视背后的核心技术原理深度解析
产品环视背后的核心技术原理深度解析
当我们流畅地在线旋转、查看一个产品的720全景时,其背后是一系列精密技术的协同工作。理解这些核心原理,有助于我们更好地应用和评估一项全景制作服务的优劣。从数据采集到最终呈现,主要经历以下几个关键技术阶段。
数据采集:精准的多角度拍摄
一切始于数据采集,即全景拍摄。其目标是在固定机位下,围绕产品捕获覆盖全部表面的二维图像序列。关键在于使用专业云台,确保相机围绕镜头“光学节点”进行旋转拍摄。节点调整的精确度直接决定了后续拼接的质量,节点不准会导致视差错误,使拼接后的图像出现重影或错位。拍摄时需保证光照稳定,并确保相邻照片有足够的重叠区域(通常30%-50%),为软件识别特征点提供依据。
图像处理:从碎片到整体的拼接艺术
采集到的碎片化图像需要通过图像拼接算法“缝合”成一张完整的等距柱状投影全景图。这个过程主要包括:特征点检测与匹配(如SIFT、SURF算法)、图像对齐、曝光补偿、色差校正以及最终的无缝融合。
算法的智能程度决定了拼接的效率和完美度。优秀的算法能自动识别并处理因光线、反光造成的差异,生成色彩均匀、过渡平滑的全景图。这是实现无死角观看体验的技术基础。
从二维到三维:三维重建的进阶应用
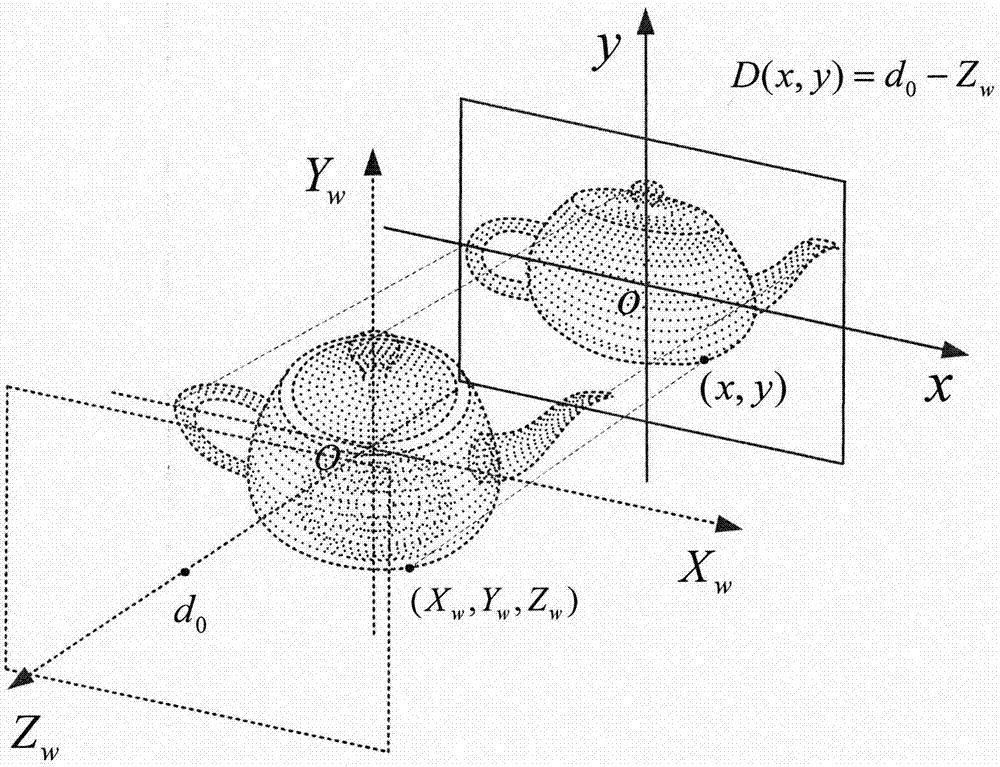
对于更高阶的产品环视,尤其是需要展示内部结构或复杂装配关系的物体,会采用三维重建技术。这不再局限于二维图片的拼接,而是通过摄影测量或多目视觉技术,根据多角度拍摄的照片计算出物体表面的三维点云数据,进而构建出三维网格模型。
基于三维模型的产品环视,用户拥有真正的三维自由度,可以从任意角度、任意距离进行观察,甚至进行虚拟拆装,体验远超基于图像的全景制作。这代表了产品数字化展示的未来方向。
从精准的节点拍摄到智能的图像缝合,再到前沿的三维重建,产品环视技术的每一次进化,都旨在更真实、更自由地还原物体本身,这正是其科技魅力所在。